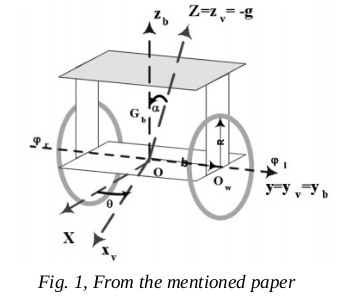
within the course of Nonlinear Control, I was intended to simulate the result of this paper, “Velocity and Position Control of a Wheeled Inverted Pendulum by Partial Feedback Linearization”, via MATLAB. Considering the inverted pendulum is an underactuated system, it is demanding to control such a nonlinear underactuated system, because there are less controllabe states than total states of the system.
As we know that Feedback Linearization is a technique for transforming the main system to a simpler form, in this case, first we derive the dynamic equations of the system, next we partially feedback linearize the system, Finally apply the controller.
Dynamic Model
&space;\ddot{q}&space;+&space;V&space;(&space;q&space;,&space;q&space;_&space;)&space;=&space;E&space;(&space;q&space;)\tau&space;&space;+&space;A^T&space;(&space;q&space;)&space;\lambda;&space;\mathbf{(1)} "dynamic equation of wheeled inverted pendulum")
Eliminate Lagrange multipliers \(\lambda\) with \(S^T\):
\dot{\nu}&space;+&space;S^T&space;(&space;M&space;\dot{S}\nu&space;+&space;V&space;(&space;q&space;,&space;\dot{q}))&space;=&space;S^{T}&space;E&space;(&space;q&space;)\tau&space;;&space;\mathbf{(2)} "Lagrange multipliers eliminated")

Then the input-affine form of equations:
&space;+&space;g&space;(&space;x&space;)&space;u;&space;x=\begin{pmatrix}&space;q_r&space;\\&space;\nu\end{pmatrix};\mathbf{(3)} "input-affine form")
&space;=[g_1(x),&space;g_2(x)]=&space;\begin{pmatrix}&space;0_{4*2}&space;\\&space;(S^T&space;M&space;S)^{-1}&space;S^T&space;E\end{pmatrix}_{7*2}&space;;&space;u=\begin{pmatrix}&space;\tau_r&space;\\&space;\tau_l\end{pmatrix};&space;\mathbf{(4)})
&space;=\begin{pmatrix}&space;f_1(x)&space;\\&space;f_2(x)\end{pmatrix}=\begin{pmatrix}&space;S_r&space;\nu&space;\\&space;-(S^T&space;M&space;S)^{-1}&space;S^T&space;(M\dot{S}\nu&space;+&space;V(q_r,&space;\dot{q_r}))\end{pmatrix}_{7*1}&space;;&space;q_r=[x_o,y_o,\theta,\alpha]^T;\mathbf{(5)})
And the new feedback law is:

}&space;)
Now let’s feedback linearize the system. Considering, it has maximum relative degree, the change of coordinates is given by:
=\begin{pmatrix}&space;x_3\\&space;x_7\\&space;x_4\\&space;x_5\\&space;x_1\\&space;x_2\\&space;&space;-x_5g_1[6]+x_6g_1[5]\\\end{pmatrix};&space;\mathbf{(7)})
Finally the equations of the system become:

cos(z_1))
sin(z_1))
+g_1[5](f_2[2]-f_2[1]\frac{g_1[6]}{g_1[5]});&space;\mathbf{(8)}&space;)
Design and Implementation of Controllers
Velocity Controller
In order to control desired parameters of the system, we need two controllers; a lower level controller with fast dynamics to track \(\theta_d\) and \(\alpha_r\), and a higher level controller with slow dynamics to make sure \(\lambda_r \in A_s\):
,&space;\omega_2=-k_{av}\dot{\alpha}-k_a(\alpha-\alpha_r);&space;\mathbf{(9)})
^2(v_{ss}-v_d)\frac{f_{ss}}{\alpha_r};&space;\mathbf{(10)})
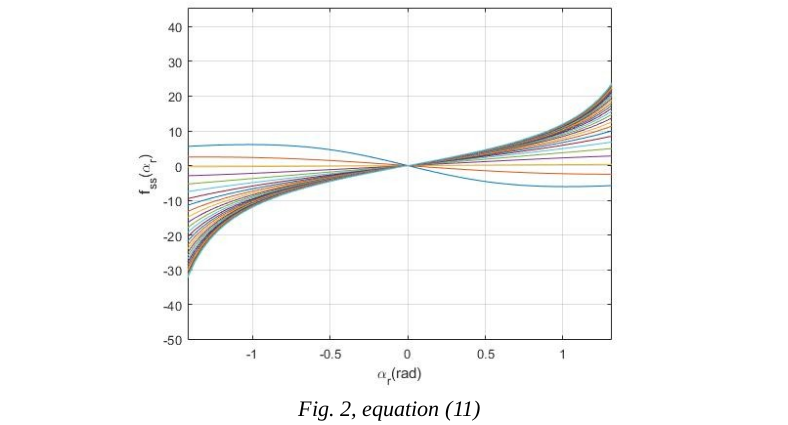
=[\frac{1}{g_1[5]}(g_1[5]f^\alpha_{22}-f^\alpha_21g_1[6])]_{\alpha=\alpha_r};\mathbf{(11)})
Simulation of equation (11):
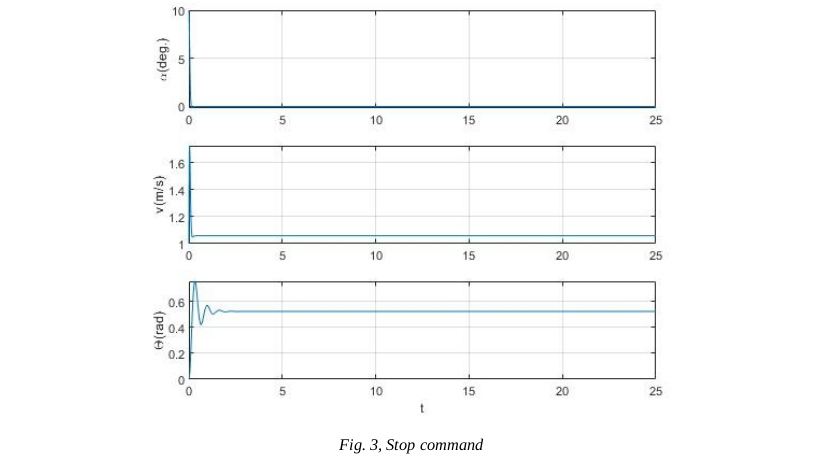
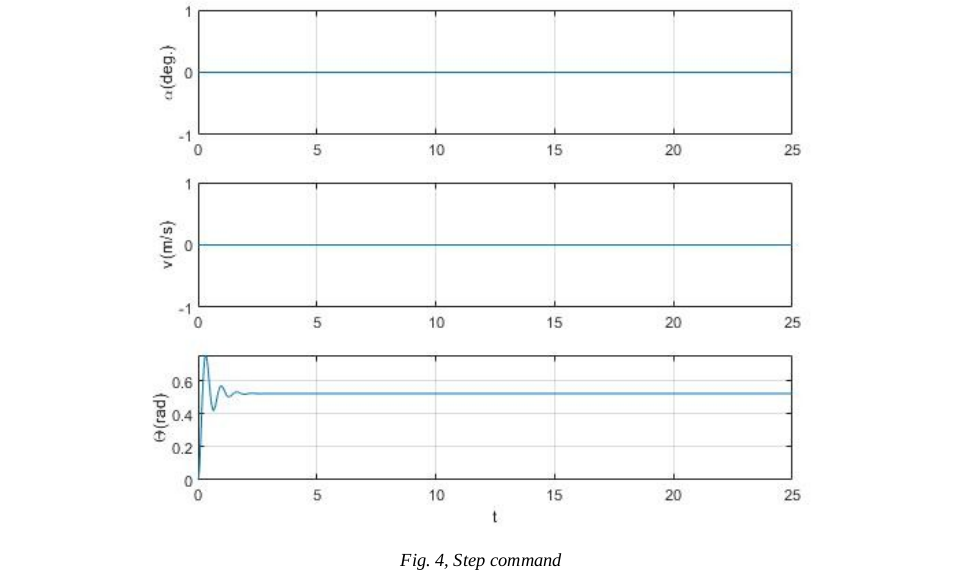
Now the outputs for step and stop commands:
Position and Stabilization Control
Here we want to design a controller to stabilize the robot in a desired coordination against the world frame. For this, it is better to deploy polar coordination for for configuration space of the robot:
})
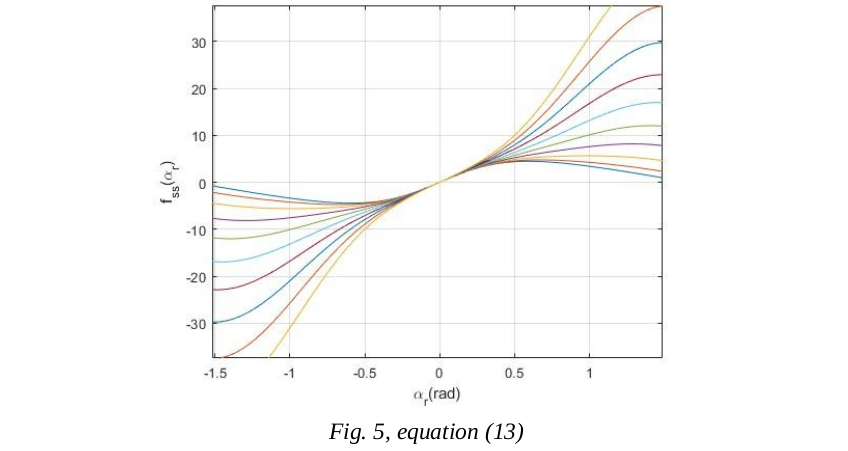
=\begin{bmatrix}(f^\alpha_{22}+f^{\dot{\theta}}_{22})-(f^\alpha_{21}+f^{\dot{\theta}}_{21})\frac{g_1[6]}{g_1[5]}\end{bmatrix}_{\alpha=\dot{\alpha}}&space;;\mathbf{(13)})
The simulation:
Same as befor we need two types of controller, higher level and lower level controllers, for higher level controller, we consider the following potential function:
}+\frac{k_v(v_{ss}-v_d)^2}{2};&space;\mathbf{(14)})
We propose the following control signal:
})
Finally, by substituting \(\alpha_r\) in the following equation, stability would be satisfied.
=-(\frac{\partial&space;V_\Sigma&space;}{\partial&space;\rho}cos(\theta-\phi)+\frac{\partial&space;V_\Sigma&space;}{\partial&space;\phi}\frac{sin(\theta-\phi)}{\rho})-k_vv;\mathbf{(16)})
And the lower level controller is:
;\mathbf{(17)})
References
[1] Velocity and Position Control of a Wheeled Inverted Pendulum by Partial Feedback Linearization
To get more details, please refer to the papaer and keep in touch with me. :)